EtherCAT, bugüne kadar en iyi endüstriyel ağ olarak kabul edilen açık endüstriyel gerçek zamanlı ve deterministik bir ethernet Fieldbus standardıdır.
EtherCAT, kontrol ve sistem mühendisleri ve makine kontrol çözümleri için; sağlam, yüksek hızlı gerçek zamanlı bir ağ olarak giderek daha popüler hale gelmektedir. Belirleyici ve yüksek hızlı güncelleme oranları ve tüm ağ cihazlarının son derece hassas senkronizasyonu ile, makine üreticileri ve sistem entegratörleri, en yüksek performans seviyesini korurken tam bir makine kontrol çözümü oluşturmak için EtherCAT kullanan özel hareket ve makine kontrol platformlarından yararlanabilir.
EtherCAT Avantajları Nelerdir?
Profibus, DeviceNet ve ModbusTCP gibi pek çok tanınmış ağdan daha hızlı büyüyerek öne çıkmıştır. Otomasyon cihazları tedarikçileri, performansı ve esnekliği arttırmak için EtherCAT‘i kendi cihaz uygulamalarında kullanabilmektedirler. Son kullanıcılar ve otomasyon sistemi tasarımcıları, özel ihtiyaçlar için kendi EtherCAT uyumlu cihazlarını uygulamaktadır.
Aşağıdaki avantajlar, EtherCAT‘in hareket kontrolü ve otomasyon alanlarında bu kadar hızlı büyümesinin sebeplerinden bazılarını içermektedir.
Yüksek Hız ve Deterministik
EtherCAT, endüstriyel otomasyon uygulamalarında inanılmaz hızlı çevrim süresi için itici bir etken olan “anında çalışan ethernet” ilkesini temel alır. Tipik bir ethernet ağında: her bir cihaza ethernet çerçeveleri (veri paketleri) gönderilir, burada cihaz daha sonra verileri okur ve merkeze bir cevap geri göndermektedir. Bu işlem, tüm cihazlar güncellenene kadar ağdaki her cihaz için tekrarlanır. Toplam ağ döngüsü süresi, tüm yanıt sürelerinin toplamı olacaktır ve deterministik değildir.
Bazen, birden fazla cihaz mesajı, bir ethercat – master‘in önceliğe göre tahkim ve organize olmasını gerektirir. Böylelikle döngü süresine gecikme ekleyerek bir diğerini kesintiye uğratabilmektedir. EtherCAT ağında, ana üniteden bir çerçeve gönderilir ve ilk bağımlı cihaz çerçeveyi aldığında; anında verileri adresiyle birlikte alır ve herhangi bir yanıt verisi yazar. Bu, çerçevenin ihmal edilebilir bir zaman gecikmesiyle tüm birimlerden etkili bir şekilde geçtiği ve daha sonra merkeze geri döndüğü anlamına gelir. Ethernet işlemine ek olarak EtherCAT, ağdaki her cihaz için bir çerçeve gerektirmek yerine; birden fazla cihaz için giden ve gelen verilerin tek bir ethernet çerçevesinde birleştirilmesine izin vererek bant genişliğini de optimize etmektedir.
Çok fazla sürücüye, I/O ve diğer cihazlara sahip ağlar için, iletim ek yükü bu yaklaşımla önemli ölçüde azaltılabilir. EtherCAT’in bu verimli ağ tasarımı, çok eksenli servo makine kontrolü gibi yüksek bant genişliği uygulamaları için idealdir.
64 sürücüyü ve birçok I/O aygıtını örnekleme ve güncelleme 250 mikrosaniyeden daha az sürede yapılabilmektedir!
Sıkı Senkronizasyon
Çok eksenli hareket kontrol ağları, çok boyutlu hareket yörüngelerinin fiziksel alanda doğru şekilde yürütülebilmelerini sağlamak için bağımsız aygıtların senkronizasyonuna büyük ölçüde bağlıdır. Bir ağdaki tüm cihazları senkronize etmek için cihazlar arasında iletim süreleri, hesaplanması ve telafi edilmesi için farklı cihazlarda birçok zaman gerekir. EtherCAT standardı bunu dağıtılmış saatler adı verilen bir mekanizma ile gerçekleştirir. Dağıtılmış tüm saatler arasındaki faz kayması 0,1 mikrosaniyeden daha az olmaktadır.
Düşük Maliyetli
EtherCat, seri üretilen ethernet iletişim cihazlarından ve tüm PC tarafından maliyeti en aza indirmek için kullanılan kablolardan yararlanmaktadır. Slave cihazları düşük maliyetli bir kontrol cihazı gerektirmektedir.
Esneklik
- CoE (EtherCAT üzerinden CANOpen)
- EoE (EtherCAT üzerinden Ethernet)
- FoE (EtherCAT üzerinden Ethernet Transferi)
- SoE (EtherCAT üzerinden Servo Sürücü)
- FSoE (EtherCAT üzerinden Güvenlik)
dahil olmak üzere çok çeşitli standart uygulama katmanlarını desteklemektedir. Bu, birden fazla satıcının aynı uygulamalar ile tam uyumlu cihazlar kullanmalarını sağlamaktadır.
Ayrıca, VoE‘yi (EtherCAT Üzerinden Satıcıya Özel Protokol) desteklemektedir. Üreticilerin, standart bir uygulamadaki genel giderlerin tolere edilemeyeceği özel bir yüksek hızlı çok eksenli kontrol platformu gibi çok yüksek bant genişliği uygulamaları için kendi protokollerini uygulamalarına izin vermektedir.
Satıcılar esnekliklerini korurken en verimli çözümü sağlamak için cihazlarını eşzamanlı olarak açık standart ve özel uygulamalarını destekleme kabiliyeti ile donatabilirler. Geleneksel olarak; en yüksek performanslı özel hareket kontrol cihazları, merkezi bir kontrolör platformunda uygulanmaktadır. Bu, kontrol ünitesinin tüm eksenlerin servo güncellemelerini tamamen senkronize etmesine ve böylece çok eksenli hareket yörüngelerinin gerçekten koordine edilmiş bir şekilde yürütülebilmesine olan ihtiyaçtan kaynaklanmaktadır.
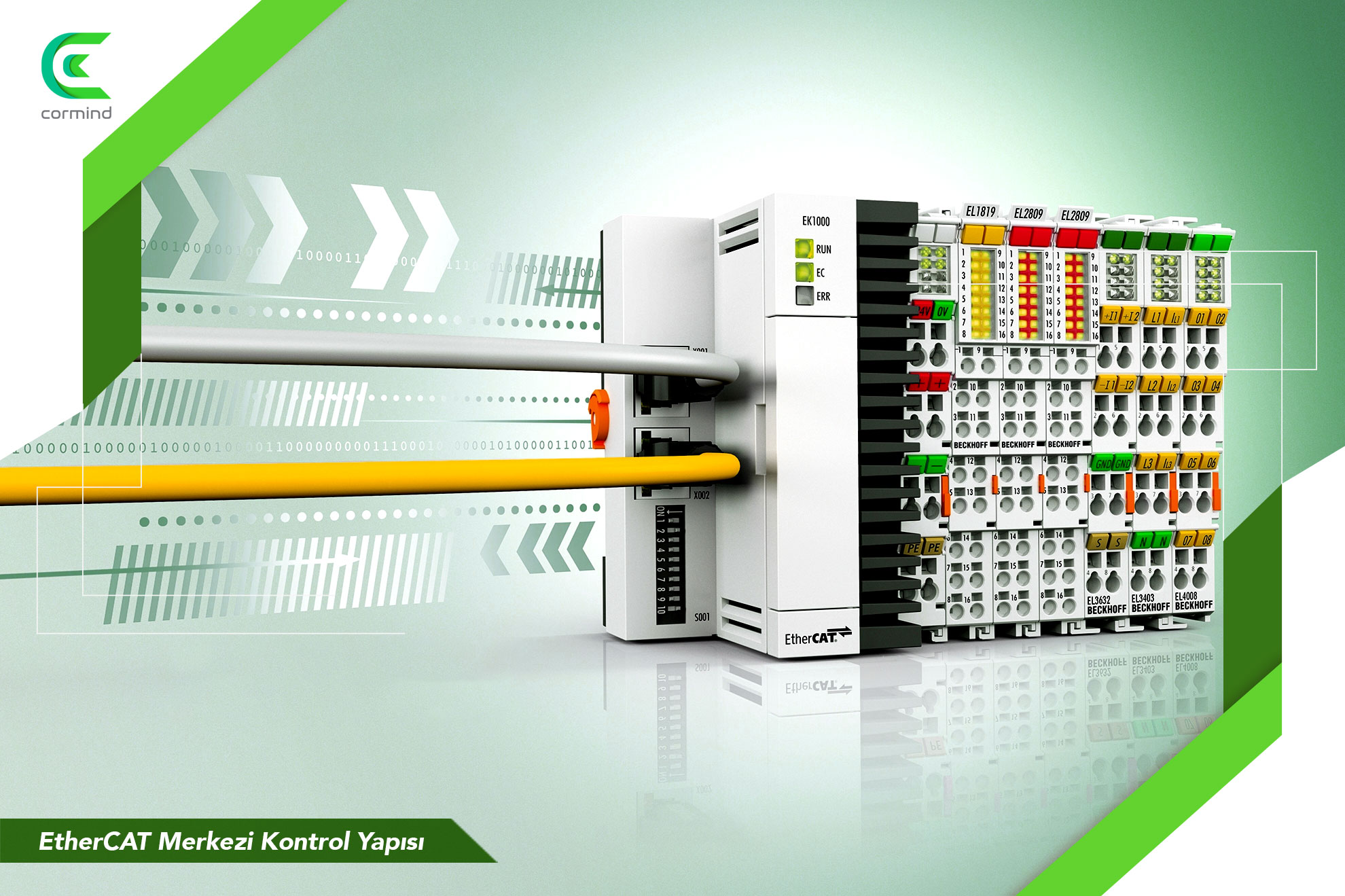
EtherCAT Merkezi Kontrol Yapısı
Merkezi kontrol yapısı, hareket kontrolörü algoritmalarının esas olarak merkezi işlemcinin hızında gerçek zamanlı harekete veya servo ile ilgili verilere erişimi sağlamaktadır. Bununla birlikte, merkezi işlemci mimarisi, eksen miktarı arttıkça kaynak yetersizliğinden müzdariptir. Eksenler eklendikçe, gerçek zamanlı kontrol için mevcut işlemci kaynakları daha fazla eksene dağıtılmalı ve sıklıkla servo güncelleme oranları ve sonuçta performans düşürülmelidir. Bu dezavantajla mücadele etmek için, ACS Hareket Kontrolü benzersiz bir dağıtılmış işlemci mimarisi kullanmaktadır. Bu mimari, gerçek zamanlı kontrol dışındaki tüm makine kontrol görevlerini yerine getirmek için güçlü bir PC tabanlı Makine İşlemci Ünitesine (MPU) dayanmaktadır. Zorlu gerçek zamanlı kontrol algoritmaları, SPi adlı özel Servo İşlemciler tarafından gerçekleştirilmektedir. Her servo işlemci bir veya iki ekseni kontrol etmektedir. Bu yaklaşımla, eksenler eklenirken, her zaman sabit bir 20kHz örnekleme ve güncelleme oranını eksen sayısı bakımından bağımsız olarak koruyarak daha fazla servo işlemcisi eklenmektedir.
EtherCAT İşlemci Mimarisi
Bu mimarinin, yüksek performanslı koordine hareket kontrolü sağladığı kanıtlanmıştır. MPU ve Servo İşlemciler arasında yüksek düzeyde senkronize ve hızlı veri aktarımı sağlamak için PCI gibi özel bir yüksek hızlı bilgisayar veri yolu gereklidir. Bu tip bir veri iletişimi fiziksel bir sınırlama getirmektedir. MPU ve SPi yongaları birbirlerinden birkaç inç uzakta durmalıdır. EtherCAT’in MPU (EtherCAT Master olarak da görev yapar) ve Servo İşlemciler (sürücüleri kontrol eden) arasında büyük mesafe sağlamak için kullanıldığı yer burasıdır.
EtherCAT tabanlı dağıtılmış işlemci mimarisi, merkezi bir yapının gücüne ve dağıtılmış bir ağ çözümünün avantajlarına sahip bir kontrol platformu uygulamak için gerekli bant genişliğini, senkronizasyonu ve fiziksel esnekliği sağlamaktadır. ACS MC4Unt, bu yaklaşımı 20kHz örnekleme ve güncelleme oranına sahip 64 adete kadar zorlu ve oldukça koordineli ekseni kontrol etmek için kullanmaktadır.
Standart bir merkez üzerinden ethernet (COE) protokolü kullanarak, motor sürücüleri ve bu standarda uygun I/O modülleri dahil olmak üzere birçok satıcı cihazının entegrasyonuna izin vermektedir. Makine üreticisi ve sistem entegratörü, gerçekten güçlü ve yüksek performanslı bir hareket kontrolü çözümü uygularken; piyasaya maliyet ve zamanı en aza indirgemek için uygulama geliştirme ortamını sağlar. Ve güçlü hareket programlama dilini ve özel kontrol platformunun araçlarını kullanabilmektedir.